

WEST LAFAYETTE – Briony Horgan raised her arms in triumph as the Mars rover Perseverance landed on Feb. 18, a symbolic declaration of mission success. That electric moment was just the beginning for the Purdue University scientist.
With Perseverance on the ground and moving, Horgan is now focused on analyzing data from the instrument she works with: Mastcam-Z.

The two square lenses of Mastcam-Z sit just below the large white SuperCam atop the rover’s mast, with a set of corkscrew motors inside the cameras giving it zoom capability strong enough to view a housefly at the far end of a soccer field.
It is part of the rover’s system of cameras, which already had sent back more than 12,000 images since the rover touched down on Mars.

Sitting a little more than 9 inches apart, the Mastcam-Z camera’s dual lenses can record images in color, in 3D, and in the video. It is precise enough that the scientists can use it for compositional analysis of the surrounding terrain.
Horgan said Mastcam-Z is the eyes for the rover, used mainly for science and strategic planning. She is part of the NASA team that designed it and is helping operate the camera on Mars.
Space enthusiasts can see some of these images. Horgan is an associate professor of planetary science in Purdue’s Department of Earth, Atmospheric, and Planetary Sciences.

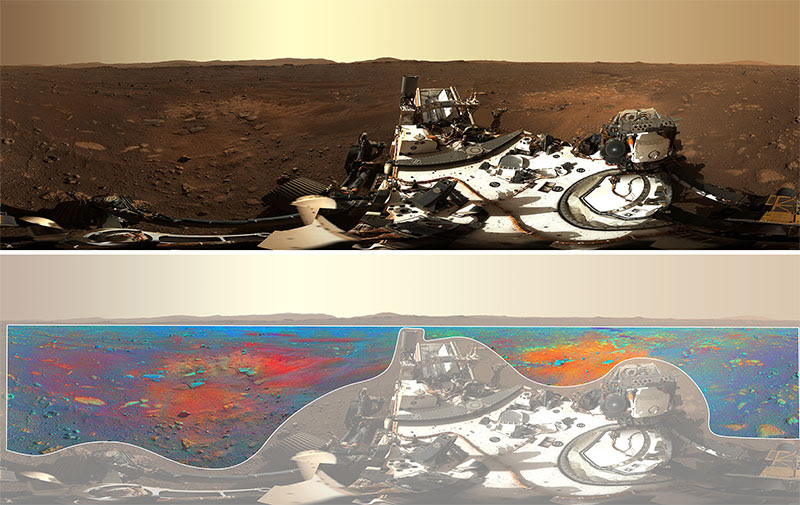
Mastcam-Z passes filters in front of the dual cameras, allowing the operators to zoom in on specific wavelengths of the sunlight reflected off rocks to help identify mineral fingerprints.

“We can do that over 13 different positions across the visible wavelengths of light that we see,” Horgan said. “We can use that to look for specific color fingerprints of different minerals on the Mars surface and use it to actually map out where different minerals are occurring.”
By refining details with those filters, Horgan said researchers can consider and plan what areas they want to examine with the rover’s high-resolution mineralogy and chemistry instruments.
A key objective for the rover is searching for signs of ancient microbial life by examining the planet’s geology. This is the first mission expected to collect samples of rock and dust from the red planet.
Mastcam-Z can also zoom out for panoramic views of the landscape surrounding the rover.
“Looking around, we see all these different rocks and textures,” Horgan said. “There’s all these discussions about what they are, and it’s really exciting right now.”
The location of the rover landing is of interest to Horgan. It’s a spot that from orbit was a large dark surface area that covered a lot of the middle of Jezero Crater. Scientists believe it could be a lava flow.
Working with the rover isn’t as simple as using a joystick to motor across the Martian surface like a remote-controlled car. A radio signal sent from Earth can take up to 20 minutes to reach Perseverance.
As one of the tactical science leads for the project, Horgan works with the project’s engineering lead to deal with this by planning the next day’s activities for the rover from beginning to end.
“The rover gets the list of activities and then executes all day: driving, safety checks, hazard avoidance,” Horgan said. “It’s semi-autonomous.”
Planning one day’s work is no small feat. Right now, it takes the team 12-15 hours to put together 12-15 hours of activities. And the planning can’t begin until the current day’s data has been sent and received.
“You really can’t know for sure what’s going on for the next day until you get the data back telling you where you are, what’s around you and your instrument status,” Horgan said. “When the data comes down, that’s when we start, sometimes as early as 3 a.m.”
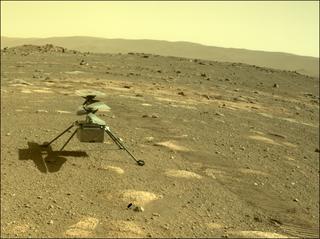
The rover is working through its initial driving and instrument tests at this point, which will be followed by work with Ingenuity, the small robotic helicopter to be deployed from the rover. That is giving Mastcam-Z time to examine the landscape.
“Right now we’re examining the surroundings trying to figure out where we should go, how do we get there and what are we going to do along the way,” Horgan said.
Information Briony Horgan, briony@purdue.edu

